AGV事業案内
仕様および各要素技術の特長
仕様(プロトタイプ) |
||||
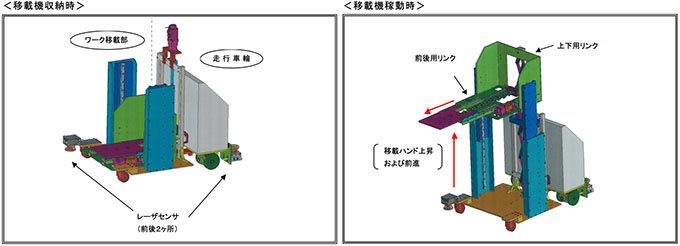
■特長 1.ワークの積卸しを自動で行います。 |
||||
 |
||||
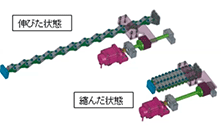
リンク式スライダシステム(ワーク移載部に採用!) |
||||
例えば1000mmを搬送するためには1000mmのボールネジ+モータの全長が 必要となり絶対に半分以下には畳めません。 |
 |
|||
 |
||||
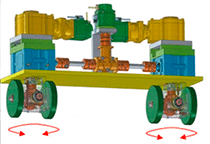
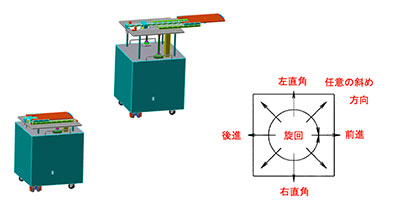
方向自在車輪システム(走行車輪部に採用!) |
||||
通常のゴム車輪を 特殊操舵機構で自在に方向転換できる機構としています。 |
||||
レーザセンサについて |
||||
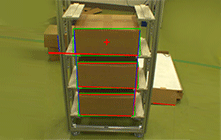
2台のレーザセンサにより前方、後方の障害物を検出すると共に、カメラによる画像処理技術でワーク、パレット、棚を検出して確実な移載を実現します。 |
 |
|||
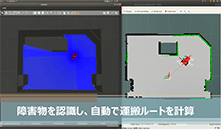
SLAM技術 |
||||
SLAMとはSimultaneous Localization and Mappingの頭文字をとったもの「自己位置特定と環境地図作成を同時に行うこと」で自動運転や自律移動ロボットなどに使われる技術です。 AGVの前後に設置されたレンジファインダからの情報により、フロアをマッピング。 ワークを拾い上げた位置から荷卸し位置まで、障害物を避けて自動運搬が可能です。 |
 |
|||
移載機付AGV |
||||
 |
本機は、ワーク移載に関しすぐれた特長を有しています。 |
|||
AGVカスタマイズ
お気軽にご相談ください |
||||
自動荷卸し機能付き搬送ロボット導入をご検討されているようでしたら、ワーク条件や導入環境などにより各要素のカスタマイズを通して、最適な仕様でご提案させていただきます。 コンタクトご希望の場合は、お気軽にお電話またはお問い合わせメールにてご相談ください。 (搬送荷重およびワークサイズをお知らせください。) |
||||
AGV カタログダウンロード
■移載機付AGVカタログ (A4サイズ、4ページ)3.1MB |
▼ダウンロードする | |||